TTMA Intelligent universal chassis
- Categories:Company News
- Author:TTMA
- Origin:
- Time of issue:2022-05-31 13:33
- Views:
(Summary description) TTMA Intelligent universal chassis Our company has many years of experience in the development of mobile robot general chassis, and provides customers with standard general mobile machine chassis. Customers can carry out secondary development based on the chassis and start to build complete machine products. The standard mobile robot chassis based on slam laser navigation technology adopts silent rubber wheels, which can realize the functions of turning in place, walking in a straight line, intelligent charging, being suitable for the ground with a flatness within ± 10mm, humanized obstacle avoidance design and low noise during walking. It has reserved rich network ports, manual charging USB ports, input and output ports and data communication protocols. main parameter Body size 600*400*300 Maximum load 100kg Maximum speed 1.5m/s Station accuracy ± 15mm~30mm Power supply time 8h-10h Rotation radius rotation in place The whole system is designed with on-board charging module, laser safety protection, 3D visual protection, excellent shock absorption design device, independent patented core controller and convenient external commissioning charging interface module, equipped with automatic charging pile. It is equipped with PC side operating software and mobile app operating software for easy use and operation. Features: 1) Rapid deployment: automatic generation of accurate environment map to realize path planning and scheduling without scene transformation; 2) Strong expansibility: with universal interface, it can quickly carry various application function accessories; 3) Self detection: real time feedback of the working state of the robot, with self inspection and fault detection functions; 4) Power stability: self patented structure, power and load can be automatically adjusted in a positive correlation within a safe range; 5) Mixed driving mode: support dynamic avoidance mode and fixed line patrol mode: 6) Strong versatility: it can be used to build service robots (disinfection robot, meal delivery robot, medical robot) and industrial mobile platform AGV. Slam laser navigation technology Slam (synchronous positioning and mapping) is synchronous positioning and mapping, which means that in an unknown environment, the robot locates itself through its own internal sensors (encoder, IMU, etc.) and external sensors (laser sensor or visual sensor), and builds an environment map incrementally based on the environmental information obtained by external sensors. In the laser navigation AGV based on slam technology, the odometer information is calculated by the encoder and IMU during the robot movement, and the robot's position is preliminarily estimated by using the robot's motion model. Then, the robot's position is accurately corrected by combining the laser data obtained by the robot's loaded laser sensor with the observation model (laser scanning matching). Finally, on the basis of accurate positioning, Add the laser data to the grid map, so that the robot can move in the environment, and finally complete the construction of the whole scene map, and its operation principle frame diagram.
TTMA Intelligent universal chassis
(Summary description)
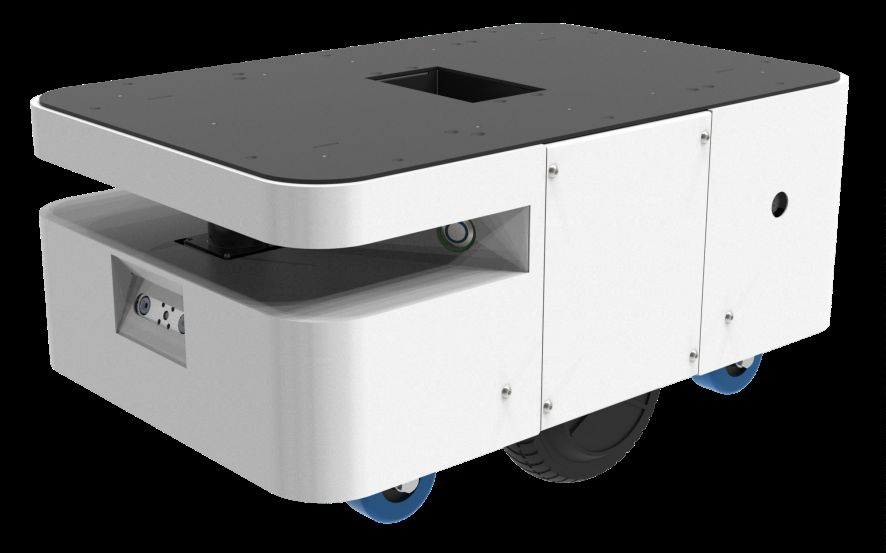
TTMA Intelligent universal chassis
Our company has many years of experience in the development of mobile robot general chassis, and provides customers with standard general mobile machine chassis. Customers can carry out secondary development based on the chassis and start to build complete machine products. The standard mobile robot chassis based on slam laser navigation technology adopts silent rubber wheels, which can realize the functions of turning in place, walking in a straight line, intelligent charging, being suitable for the ground with a flatness within ± 10mm, humanized obstacle avoidance design and low noise during walking. It has reserved rich network ports, manual charging USB ports, input and output ports and data communication protocols.
main parameter
Body size 600*400*300
Maximum load 100kg
Maximum speed 1.5m/s
Station accuracy ± 15mm~30mm
Power supply time 8h-10h
Rotation radius rotation in place
The whole system is designed with on-board charging module, laser safety protection, 3D visual protection, excellent shock absorption design device, independent patented core controller and convenient external commissioning charging interface module, equipped with automatic charging pile. It is equipped with PC side operating software and mobile app operating software for easy use and operation.
Features:
1) Rapid deployment: automatic generation of accurate environment map to realize path planning and scheduling without scene transformation;
2) Strong expansibility: with universal interface, it can quickly carry various application function accessories;
3) Self detection: real time feedback of the working state of the robot, with self inspection and fault detection functions;
4) Power stability: self patented structure, power and load can be automatically adjusted in a positive correlation within a safe range;
5) Mixed driving mode: support dynamic avoidance mode and fixed line patrol mode:
6) Strong versatility: it can be used to build service robots (disinfection robot, meal delivery robot, medical robot) and industrial mobile platform AGV.
Slam laser navigation technology
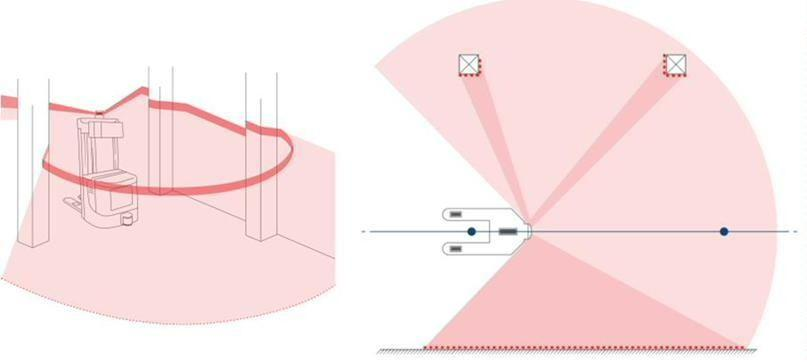
Slam (synchronous positioning and mapping) is synchronous positioning and mapping, which means that in an unknown environment, the robot locates itself through its own internal sensors (encoder, IMU, etc.) and external sensors (laser sensor or visual sensor), and builds an environment map incrementally based on the environmental information obtained by external sensors.
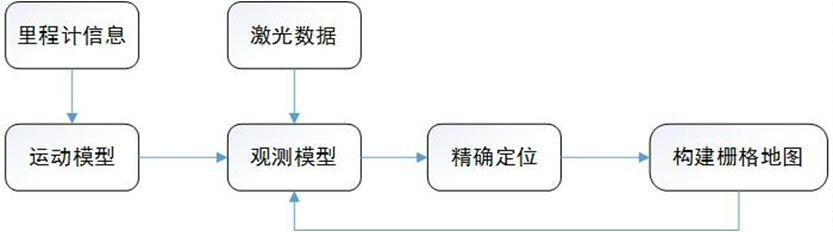
In the laser navigation AGV based on slam technology, the odometer information is calculated by the encoder and IMU during the robot movement, and the robot's position is preliminarily estimated by using the robot's motion model. Then, the robot's position is accurately corrected by combining the laser data obtained by the robot's loaded laser sensor with the observation model (laser scanning matching). Finally, on the basis of accurate positioning, Add the laser data to the grid map, so that the robot can move in the environment, and finally complete the construction of the whole scene map, and its operation principle frame diagram.
- Categories:Company News
- Author:TTMA
- Origin:
- Time of issue:2022-05-31 13:33
- Views:
TTMA Intelligent universal chassis
Our company has many years of experience in the development of mobile robot general chassis, and provides customers with standard general mobile machine chassis. Customers can carry out secondary development based on the chassis and start to build complete machine products. The standard mobile robot chassis based on slam laser navigation technology adopts silent rubber wheels, which can realize the functions of turning in place, walking in a straight line, intelligent charging, being suitable for the ground with a flatness within ± 10mm, humanized obstacle avoidance design and low noise during walking. It has reserved rich network ports, manual charging USB ports, input and output ports and data communication protocols.
main parameter
Body size 600*400*300
Maximum load 100kg
Maximum speed 1.5m/s
Station accuracy ± 15mm~30mm
Power supply time 8h-10h
Rotation radius rotation in place
The whole system is designed with on-board charging module, laser safety protection, 3D visual protection, excellent shock absorption design device, independent patented core controller and convenient external commissioning charging interface module, equipped with automatic charging pile. It is equipped with PC side operating software and mobile app operating software for easy use and operation.
Features:
1) Rapid deployment: automatic generation of accurate environment map to realize path planning and scheduling without scene transformation;
2) Strong expansibility: with universal interface, it can quickly carry various application function accessories;
3) Self detection: real time feedback of the working state of the robot, with self inspection and fault detection functions;
4) Power stability: self patented structure, power and load can be automatically adjusted in a positive correlation within a safe range;
5) Mixed driving mode: support dynamic avoidance mode and fixed line patrol mode:
6) Strong versatility: it can be used to build service robots (disinfection robot, meal delivery robot, medical robot) and industrial mobile platform AGV.
Slam laser navigation technology
Slam (synchronous positioning and mapping) is synchronous positioning and mapping, which means that in an unknown environment, the robot locates itself through its own internal sensors (encoder, IMU, etc.) and external sensors (laser sensor or visual sensor), and builds an environment map incrementally based on the environmental information obtained by external sensors.
In the laser navigation AGV based on slam technology, the odometer information is calculated by the encoder and IMU during the robot movement, and the robot's position is preliminarily estimated by using the robot's motion model. Then, the robot's position is accurately corrected by combining the laser data obtained by the robot's loaded laser sensor with the observation model (laser scanning matching). Finally, on the basis of accurate positioning, Add the laser data to the grid map, so that the robot can move in the environment, and finally complete the construction of the whole scene map, and its operation principle frame diagram.
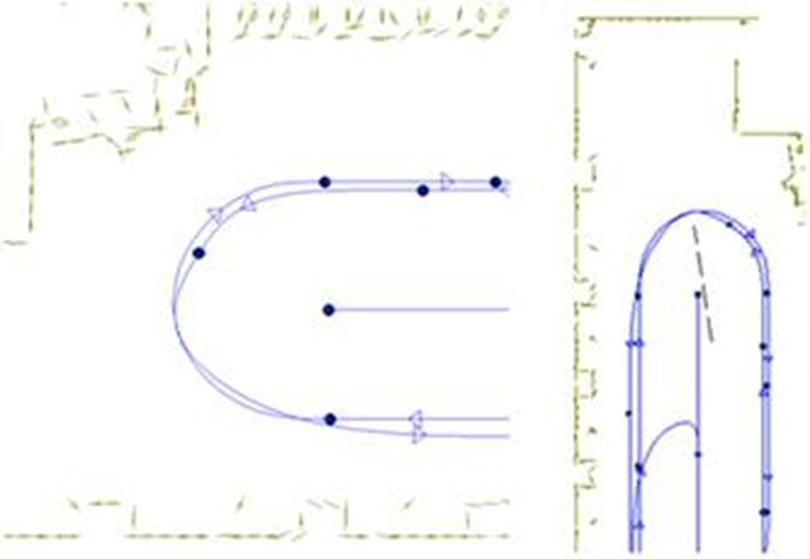
After completing the scene map construction, it is necessary to carry out map based position and path planning on the basis of the constructed map to realize the navigation of Ag. During the movement of Ag Ⅴ, the laser data obtained by the odometer information and the laser sensor are matched with the map to continuously obtain the precise position of the AGV in the map in real time. At the same time, the path planning is carried out according to the current position and the task destination (dynamic route or fixed route, and each route is slightly different). The speed control command is sent to the AGV according to the planned trajectory, so that the AGV can complete the task, Path planning based on slam map.
Scan the QR code to read on your phone
-
Tel
-
QQ
-
Wechat

-
Top


Tel: 020-87470512/18026254588(Wechat )
Email: ttma_gz@163.com
HO: Room 1208, Baiyun Electric Technology Building, 1633 Beitai Road, Baiyun District, Guangzhou
Add: No. 37, Fenghe Jiangniu Road, Renhe Town, Baiyun District, Guangzhou
No.19, Taocun Industrial Zone, Beijiao Town, Shunde District, Foshan City, Guangdong Province




Copyright © 2020 Guangzhou Tengtian Machinery Industry Co., Ltd. All Rights reserved 粤ICP备20010952号
By: 300.cn